

Pine fun - Excursion to the user land
Equipped with the rudimentary debugging skills presented in the previous article, it is time to conquer the remaining stumbling blocks on our way to the user land.
To quickly recall, the starting point of our investigation was the following error message.
Error: Assertion failed: id < _count && _cpus[id].constructed() Error: File: /.../repos/base-hw/src/core/kernel/cpu.cc:205 Error: Function: Kernel::Cpu& Kernel::Cpu_pool::cpu(unsigned int)
By following the call chain leading to this message in reverse, we ultimately arrived at base-hw/src/core/kernel/init.cc at line 64 right in the middle of the function kernel_init:
pool_ready = cpu_pool().initialize();
To double check that the error indeed occurs somewhere in the initialize method, let's wrap the call with a bit of instrumentation.
Genode::log("call cpu_pool().initialize()");
pool_ready = cpu_pool().initialize();
Genode::log("pool_ready=", pool_ready);
The resulting output confirms our hypothesis.
Starting kernel ... call cpu_pool().initialize() Error: Assertion failed: id < _count && _cpus[id].constructed()
It is always good to have the reassurance about still being on the right track. As we suspected, cpu_pool().initialize() is called but never returns. So let's look at its implementation in base-hw/src/core/kernel/cpu.cc.
bool Cpu_pool::initialize()
{
unsigned id = Cpu::executing_id();
_cpus[id].construct(id, _global_work_list);
return --_initialized == 0;
}
Each element of the _cpus array is a Constructible<Cpu> object. The Constructible pattern is used throughout Genode. It allows for the static allocation of dynamically created objects. The construct method triggers the construction of a Cpu object. We are ultimately faced with a general question: How to instrument the construction of C++ objects?
Debugging the construction of C++ objects
The lowest-hanging fruit is adding a message right at the beginning of the constructor's body:
Cpu::Cpu(unsigned const id, Inter_processor_work_list & global_work_list)
:
... plenty of initializers ...
{
Genode::log(__PRETTY_FUNCTION__);
_arch_init();
}
Upon the next run, we see no such message. So we can conclude that we get stuck in the middle of the construction of one of the base classes or aggregated members. As illustrated by the following picture, the body of the constructor is called pretty late in the process of constructing an object.

|
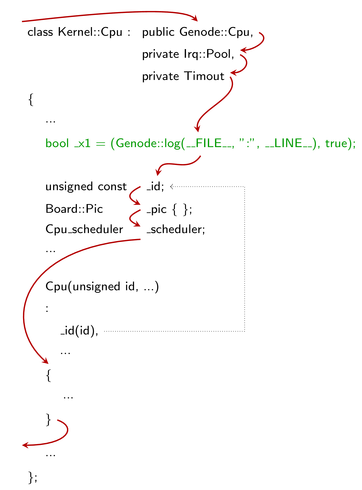
Placing debug messages gets a little bit more cumbersome now. We have to disguise such messages as object attributes. For example, by placing the following line right at the start of the class body, we can see whether we get stuck in the construction of one of the base classes or - later - during the construction of a member.
bool _x1 = ( Genode::log(__FILE__, ":", __LINE__), true );
The effect of this instrumentation looks as follows.
|
The trick is to wrap the log call into an expression that can be used as initialization of a dummy member. When the construction of the Cpu object reaches the point of the _x1 member, we see the message as a side effect. The member _x1 is never actually used.
On the next run, we see the following:
Starting kernel ... call Cpu_pool::initialize() /.../repos/base-hw/src/core/kernel/cpu.h:77 Error: Assertion failed: id < _count && _cpus[id].constructed()
Since we see the message, we know that the problem occurs not in any of the base classes but during the construction of a subsequent member. To find out which one, we can spill dummy members in-between the various members, like so:
unsigned const _id;
bool _x2 = ( Genode::log(__FILE__, ":", __LINE__), true );
Board::Pic _pic {};
bool _x3 = ( Genode::log(__FILE__, ":", __LINE__), true );
Timer _timer;
bool _x4 = ( Genode::log(__FILE__, ":", __LINE__), true );
Cpu_scheduler _scheduler;
bool _x5 = ( Genode::log(__FILE__, ":", __LINE__), true );
Idle_thread _idle;
bool _x6 = ( Genode::log(__FILE__, ":", __LINE__), true );
Ipi _ipi_irq;
bool _x7 = ( Genode::log(__FILE__, ":", __LINE__), true );
If this looks unsophisticated, it's because it is. The next run reveals the following.
call cpu_pool().initialize() bool Kernel::Cpu_pool::initialize() /plain/no/genode.git/repos/base-hw/src/core/kernel/cpu.h:78 /plain/no/genode.git/repos/base-hw/src/core/kernel/cpu.h:117 Error: Assertion failed: id < _count && _cpus[id].constructed()
From this message, we can conclude that the construction of the _pic member is the problem. Does that ring a bell? In the backtrace, we obtained at the and of the previous article, we indeed observed the following line.
/.../base-hw/src/core/spec/arm/virtualization/gicv2.h:22
We could have saved some time by following the output of the backtrace utility more closely, but we would have missed our little excursion to the C++ constructor instrumentation.
By continuing the manual instrumentation work, we end up in the Gicv2 constructor, specifically in the initialization of the _max_irq member. The max_irq function interacts with memory-mapped registers of the interrupt controller. Recalling that we have merely provided dummy values of the register addresses, the failure is no longer a mystery at all.
Let's revisit the corners that we cut while mirroring the i.MX8 EVK board support:
-
We kept the definitions for memory-mapped I/O regions for the IRQ controller's CPU_BASE and DISTR_BASE untouched, knowing that the values most certainly mismatch with the Allwinner SoC.
-
We pruned the core_mmio regions to cover only the UART. So even if core had the right numbers, it could not access the underlying hardware registers.
-
We set NR_OF_CPUS to 4 but left Board::Cpu::wake_up_all_cpus empty.
There are quite a few uncertainties. A good way to reduce them is to first take the multi-core-related issues from the table. From experience, we know that the bring-up of secondary CPU cores can be a pain. So let us safe this topic for a later step.
By bringing up a single-processor variant of the kernel first, we will certainly reach the state of a working kernel more quickly. Subsequent user-level developments like driver-related work can then happen in parallel with the fiddly work on the kernel's multi-processor support. Disabling the kernel's multi-processor support comes down to changing the NR_OF_CPUS definition from 4 to 1 in the two files lib/mk/spec/arm_v8/bootstrap-hw-pine_a64lts.mk and lib/mk/spec/arm_v8/core-hw-pine_a64lts.mk.
Making the interrupt controller driver happy
The ARM GIC interrupt controller consists of two parts. Similar to distinction between the I/O APIC and local APIC on x86 hardware, there exists a so-called distributor and a CPU-local interrupt controller. The distributor is responsible for routing interrupts to CPU cores whereas the CPU-local interrupt controller handles the interrupt delivery for an individual CPU. So on a 4-core SoC, there are one distributor and four CPU-local interrupt controllers. The memory-mapped registers of all CPU-local interrupt controllers are the same whereas each CPU can access only its own local controller.
To find out the addresses of both parts for the Allwinner SoC, there are two convenient sources of information. First, the U-Boot boot loader that we built in a prior step comes with a huge database of board specifications in the form of so-called device tree (dts) files inside the directory u-boot/arch/arm/dts/. By grepping for "pine" we find many files referring to "sun50i". By grepping for "gic" in all files named "sun50i", we end up at sun50i-a64.dtsi. In there, the following snippet catches our attention:
u-boot/arch/arm/dts$ vim sun50i-a64.dtsi
gic: interrupt-controller@1c81000 {
compatible = "arm,gic-400";
reg = <0x01c81000 0x1000>,
<0x01c82000 0x2000>,
<0x01c84000 0x2000>,
<0x01c86000 0x2000>;
interrupts = <GIC_PPI 9 (GIC_CPU_MASK_SIMPLE(4) | IRQ_TYPE_LEVEL_HIGH)>;
interrupt-controller;
#interrupt-cells = <3>;
};
By looking at the numbers, we unfortunately still don't know which register ranges refers to the distributor and the CPU local controller. We could consult ARM's official documentation.
Alternatively, we find the answer in the Allwinner A64 user manual on page 74. It states the following:
GIC_DIST: 0x01C80000 + 0x1000 GIC_CPUIF:0x01C80000 + 0x2000
With this knowledge gained, we can change the definitions in our pine_a64lts_board.h file to the following.
IRQ_CONTROLLER_DISTR_BASE = 0x01c81000, IRQ_CONTROLLER_DISTR_SIZE = 0x1000, IRQ_CONTROLLER_CPU_BASE = 0x01c82000, IRQ_CONTROLLER_CPU_SIZE = 0x2000,
Additionally, those resources must be registered as core's memory-mapped I/O regions in board/pine_a64lts/platform.cc.
Bootstrap::Platform::Board::Board()
:
early_ram_regions(Memory_region { ::Board::RAM_BASE, ::Board::RAM_SIZE }),
late_ram_regions(Memory_region { }),
core_mmio(Memory_region { ::Board::UART_BASE, ::Board::UART_SIZE },
Memory_region { ::Board::Cpu_mmio::IRQ_CONTROLLER_DISTR_BASE,
::Board::Cpu_mmio::IRQ_CONTROLLER_DISTR_SIZE },
Memory_region { ::Board::Cpu_mmio::IRQ_CONTROLLER_CPU_BASE,
::Board::Cpu_mmio::IRQ_CONTROLLER_CPU_SIZE })
{
::Board::Pic pic {};
}
When building and running the run/log system image the next time, we get filled with joy:
Starting kernel ... kernel initialized ROM modules: ROM: [000000004012c000,000000004012c156) config ROM: [0000000040006000,0000000040007000) core_log ROM: [00000000401eb000,000000004022c260) init ROM: [0000000040134000,00000000401eacb0) ld.lib.so ROM: [0000000040004000,0000000040005000) platform_info ROM: [000000004012d000,00000000401331e8) test-log Genode 20.11-197-g635985f542 <local changes> 2010 MiB RAM and 64533 caps assigned to init [init -> test-log] hex range: [0e00,1680) [init -> test-log] empty hex range: [0abc0000,0abc0000) (empty!) [init -> test-log] hex range to limit: [f8,ff] [init -> test-log] invalid hex range: [f8,08) (overflow!) [init -> test-log] negative hex char: 0xfe [init -> test-log] positive hex char: 0x02 [init -> test-log] floating point: 1.70 [init -> test-log] multiarg string: "parent -> child.7" [init -> test-log] String(Hex(3)): 0x3 [init -> test-log] Very long messages: [init -> test-log -> log] 1.....................................................................................................................................................................................................................................2 [init -> test-log] 3.....................................................................................................................................................................................................................................4 [init -> test-log] 5.....................................................................................................................................................................................................................................6 [init -> test-log] [init -> test-log] Test done.
We just witnessed the first successful excursion to the user land. The kernel started the user-level init component, which in turn started the test-log program as child component. The output of test program looks just perfect! To truly appreciate what just happened, consider that the simple system scenario already entails most of Genode's fundamental mechanisms:
-
Transition between kernel and user land and vice versa
-
Multiple protection domains protected by virtual memory
-
Synchronous inter-component communication calls (RPC)
-
Asynchronous notifications
-
Shared memory between components
-
The ELF loading of programs
-
Handling of the system's configuration
-
Multi-threading and inter-thread synchronization
-
Dynamic linking
Public repository
With the first version of the kernel working, now is a good time to share the intermediate result.
- Git repository of the Allwinner board support
The simple log-test scenario above is just the beginning. In the next article, we take the board through the entire test suite of the Genode base framework.